|

|
|
|
平面であれば歩行ロボットより
車輪の方が低コストです。
座席昇降とこまわり性能のすぐれた
「くるくるマウス」の足まわりを利用して
介護ロボットが出来る可能性もあります。
|
座位のまま高い位置にある状態
|
| |
|
|

|

|
|
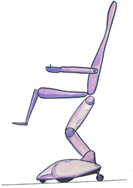
「くるくるマウス」の最終型です。
床から高い位置まで、座席が上下します。
|
|
重心移動を出来るので、
いつでも最も安定した位置に座席があります。
オレンジの部分はフルリクライニングの図です。
|
|
立った姿勢に変化した図
コンパクトな1台で立つ座る寝るが出来ます。
|
|
| |
|
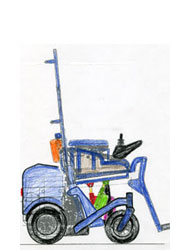
〜アクティブシート式付電動車椅子の構想〜
イメージ写真例
筋ジスの方など病気が進行してくると、座面が傾斜すると姿勢が保てなくなります。
多くの場合、障害者はバケットシートにはめ込まれている状態です。
アローワンのアクティブシートはジャイロシステムで、常に重力方向に対して一定角度で
制御されるものです。水平にセットした座面は地面が斜めだろうが、
下り坂、上り坂であろうが、常に水平です。
乗り手が大変な思いをして体を保たなくても自動的に水平に保たれるのです。
この機構は前後・左右・傾斜のチルトが可能です。
そこでジャイロシステムを切り離して能動的にシートを動かすとリハビリにも応用できます。
この構想はすぐにでも実用化できますが、開発設計製作費の点などにより実用化は未定です。
この開発には新潟県の(有)ミクロウィングの石川氏を協力者として予定しています。
石川氏は新潟県でケイ損の方のために国産、輸入外車を改造してフルオーダーで個別製作
しているスペシャリストです。 |
| |
|
イメージ図
|
写真は、イメージ図に基づき、合成写真です。 |
|
|

|
| |
|
|
座席最下位
|
|

|
|
| |
|
|
リクライニング
|
|

|
|
|
後方へチルト(下り坂) チルト最高45度まで。
自動制御機能で坂に対して座席は常に水平状態を保ちます。
|
| |
|
|

|
|
|
前方チルト(上り坂25度)
|
| |
|

|
|
|
傾斜路走行状態(リハビリの為傾斜)
|
| |
|
|
|

|
|
立ち上がり
|
